Future industrial production is characterised by very high demands regarding flexibility and quality along with fast and short product life cycles. These demands can only be met by a close cooperation in production of information technologies, automation technologies, robotics, and humans. Here, key technologies for creating a safe joint working space are an essential field of research. The institute is intensely working on these key technologies – with a view on the total range of robot control and programming. Basic functions like realtime movement generation including avoiding obstacles as well as strategies and modes of behaviour for intuitive handling of unexpected physical contacts with the environment provide safety at work. In this way, programmes for production support can be quickly established, adapted to the situation, and optimised as required by the programming system with the help of the shop floor workers on site.



Future Manufacturing
After mechanization, mass production and automation, the so-called fourth industrial revolution, or Industry 4.0, has begun with the current trends towards complete digitization and networking of production units. These trends are promoted by the increasing individualization of products and shorter time-to-market, which place greater demands on the flexibility and versatility of production lines. Here adaptive and autonomous robot systems can make a decisive contribution.
In the Production of the Future application domain, systems and methods are being developed for this intended to enable the flexible use of robot systems. Here, the work is divided into several key areas. They include testing safe interactions of humans and robots as well as intuitive input options for the user to quickly implement new applications.
Furthermore, robotic skills are being developed for the autonomous execution of logistics and production processes. In addition, robotic work cells are being developed that can be reconfigured independently for new tasks. By reducing manual adjustment work and set-up times, as well as by intelligently executing the processes, an increase in productivity can be achieved in the future.
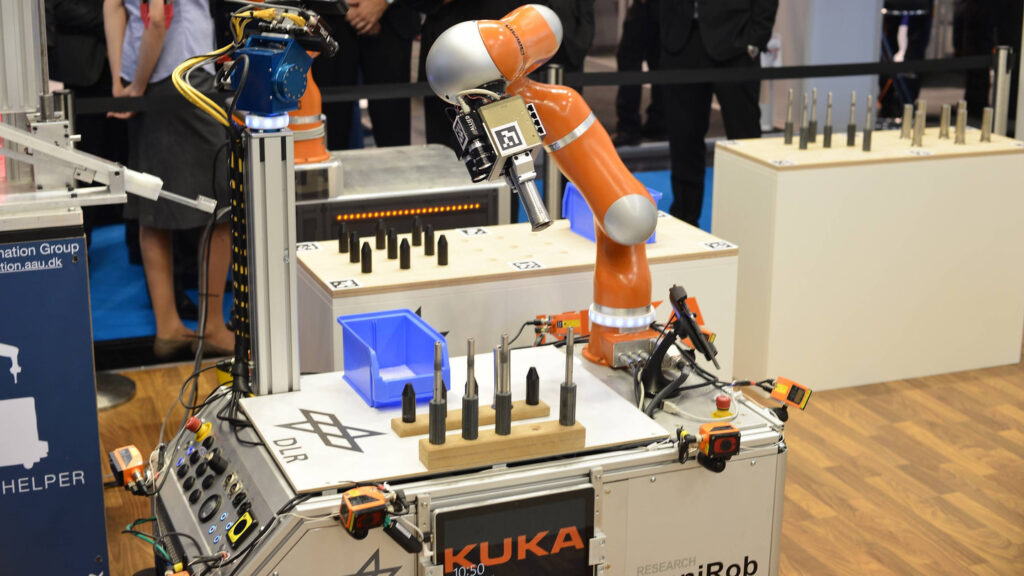
The Autonomous Industrial Mobile Manipulator (AIMM) of the DLR is focused on fetch and carry operations in partially unstructured environments. In contrast to traditional industrial robots, by combining a manipulator with a mobile platform, the application possibilities of a robotic system can be considerably extended, especially in an industrial context. For instance, thanks to the extended working space of the robot, large components can be machined.

While more and more new types of robots are available for human-robot collaboration (HRC), sharp-edged robot tools and components continue to pose a major threat of possible injuries in the case of a human-machine collision. To solve this problem, we designed an airbag that enables HRC for a wide range of robot tools and objects without limiting the function of the overall robotic system.

The DLR Light Weight Robot III (LWR III) is a light-weight robot with seven degrees of freedom, which was in 2003 presented to the public for the first time.
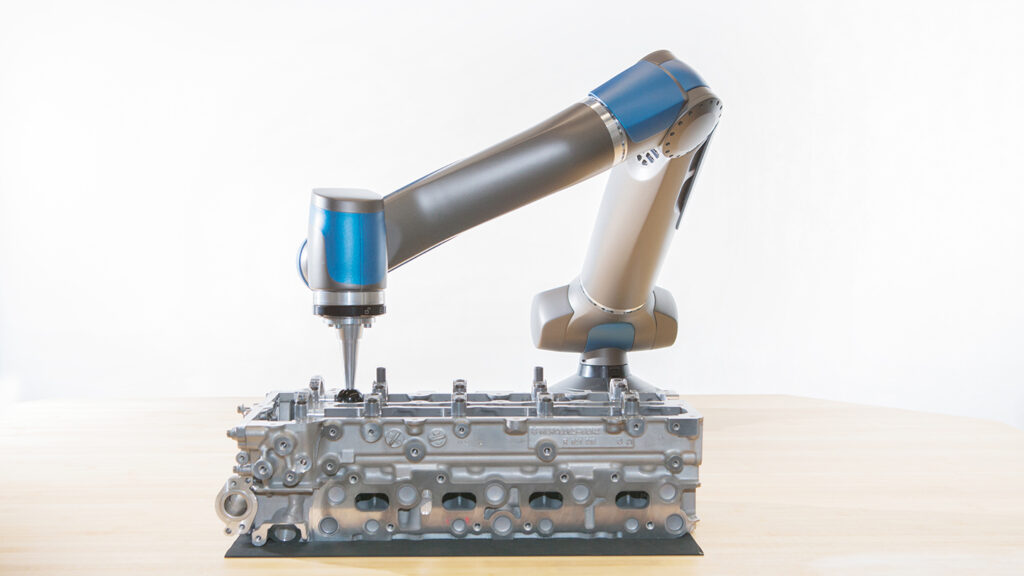
The light-weight robot SARA demonstrates novel functionalities in force controlled robotics for a smooth human-robot collaboration. Industry 4.0 applications thereby become more efficient, cheaper and safer.
Human-Robot Interaction
University of Augsburg’s Chair of Human-Centered AI is deeply investigating human-robot interaction, focusing on effective collaboration strategies and the resolution of system failures. They’ve discovered that technical glitches can lead to user frustration and reduced trust. Their ongoing studies aim to empower workers by enabling them to independently address failures through a specialized Failure Management Tool, which includes autonomous detection, clear communication, and guidance for resolution. Ultimately, this initiative seeks to enhance worker-robot collaboration and maintain seamless productivity in industrial settings.

Intelligent Service Robotics
Universal service robots are envisaged to revolutionize the way we live, from public services, over healthcare applications, to personal assistance. The robots required therefore have to be versatile, intelligent, and dexterous. RM contributes toward this vision by introducing the wheeled service robots Rollin’ Justin and Agile Justin, the torque-controlled humanoid robot TORO, the intrinsically compliant robot David as well as the C-Runner research platform. Together, these systems represent our next generation of highly capable, intelligent service robots.
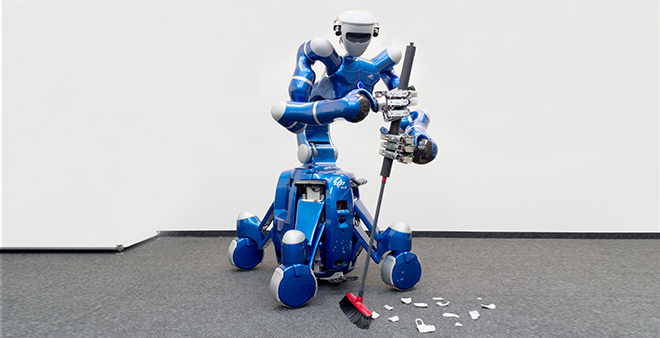
The work surrounding Rollin ‘Justin includes the study of compliant whole body movements and their effects on the environment. Specifically, everyday household tasks such as window wiping, sweeping or vacuuming are examined. Credit: DLR (CC-BY 3.0)